
Yazılar
 https://erhankilic.org/wp-content/uploads/2023/09/depth-first-search.jpg
720
1280
Erhan Kılıç
https://erhankilic.org/wp-content/uploads/2018/03/lastlogo.png
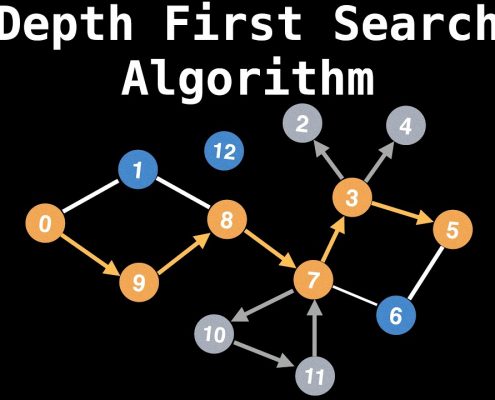
Erhan Kılıç2023-09-06 09:58:462025-09-23 21:38:54Derinlik Öncelikli Arama (DFS) Algoritması Rehberi
https://erhankilic.org/wp-content/uploads/2023/09/depth-first-search.jpg
720
1280
Erhan Kılıç
https://erhankilic.org/wp-content/uploads/2018/03/lastlogo.png
Erhan Kılıç2023-09-06 09:58:462025-09-23 21:38:54Derinlik Öncelikli Arama (DFS) Algoritması Rehberi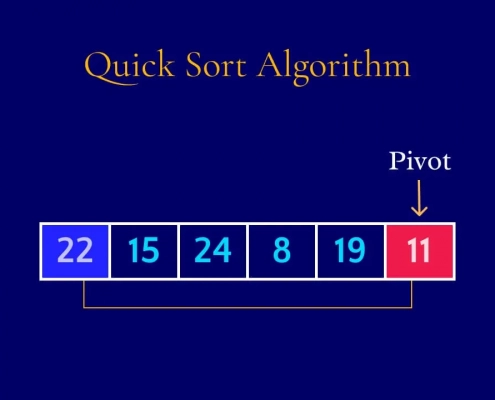 https://erhankilic.org/wp-content/uploads/2023/09/quick-sort.webp
720
1280
Erhan Kılıç
https://erhankilic.org/wp-content/uploads/2018/03/lastlogo.png
Erhan Kılıç2023-09-05 12:56:302025-09-23 21:39:16Hızlı Sıralama (Quick Sort) Rehberi: Böl ve Fethet Algoritması
https://erhankilic.org/wp-content/uploads/2023/09/quick-sort.webp
720
1280
Erhan Kılıç
https://erhankilic.org/wp-content/uploads/2018/03/lastlogo.png
Erhan Kılıç2023-09-05 12:56:302025-09-23 21:39:16Hızlı Sıralama (Quick Sort) Rehberi: Böl ve Fethet Algoritması https://erhankilic.org/wp-content/uploads/2023/09/merge-sort.jpg
450
800
Erhan Kılıç
https://erhankilic.org/wp-content/uploads/2018/03/lastlogo.png
Erhan Kılıç2023-09-04 11:02:342025-09-23 21:39:27Birleştirme Sıralaması (Merge Sort) Rehberi: Böl ve Fethet Algoritması
https://erhankilic.org/wp-content/uploads/2023/09/merge-sort.jpg
450
800
Erhan Kılıç
https://erhankilic.org/wp-content/uploads/2018/03/lastlogo.png
Erhan Kılıç2023-09-04 11:02:342025-09-23 21:39:27Birleştirme Sıralaması (Merge Sort) Rehberi: Böl ve Fethet Algoritması https://erhankilic.org/wp-content/uploads/2023/08/Quick-sort-vs-Merge-sort.jpg
270
574
Erhan Kılıç
https://erhankilic.org/wp-content/uploads/2018/03/lastlogo.png
Erhan Kılıç2023-08-30 12:10:132025-09-23 21:41:31Birleştirme Sıralaması ve Hızlı Sıralama Rehberi: Böl ve Fethet Algoritmaları
https://erhankilic.org/wp-content/uploads/2023/08/Quick-sort-vs-Merge-sort.jpg
270
574
Erhan Kılıç
https://erhankilic.org/wp-content/uploads/2018/03/lastlogo.png
Erhan Kılıç2023-08-30 12:10:132025-09-23 21:41:31Birleştirme Sıralaması ve Hızlı Sıralama Rehberi: Böl ve Fethet Algoritmaları https://erhankilic.org/wp-content/uploads/2023/08/Binary_Search.jpg
345
984
Erhan Kılıç
https://erhankilic.org/wp-content/uploads/2018/03/lastlogo.png
Erhan Kılıç2023-08-29 21:53:272025-09-23 21:43:27İkili Arama Algoritması: Verimlilik
https://erhankilic.org/wp-content/uploads/2023/08/Binary_Search.jpg
345
984
Erhan Kılıç
https://erhankilic.org/wp-content/uploads/2018/03/lastlogo.png
Erhan Kılıç2023-08-29 21:53:272025-09-23 21:43:27İkili Arama Algoritması: Verimlilik https://erhankilic.org/wp-content/uploads/2023/08/big-o-notation.png
268
877
Erhan Kılıç
https://erhankilic.org/wp-content/uploads/2018/03/lastlogo.png
Erhan Kılıç2023-08-28 12:25:112025-09-23 21:45:57Büyük O Notasyonu Rehberi: Algoritma Verimliliğini Anlama
https://erhankilic.org/wp-content/uploads/2023/08/big-o-notation.png
268
877
Erhan Kılıç
https://erhankilic.org/wp-content/uploads/2018/03/lastlogo.png
Erhan Kılıç2023-08-28 12:25:112025-09-23 21:45:57Büyük O Notasyonu Rehberi: Algoritma Verimliliğini Anlama